
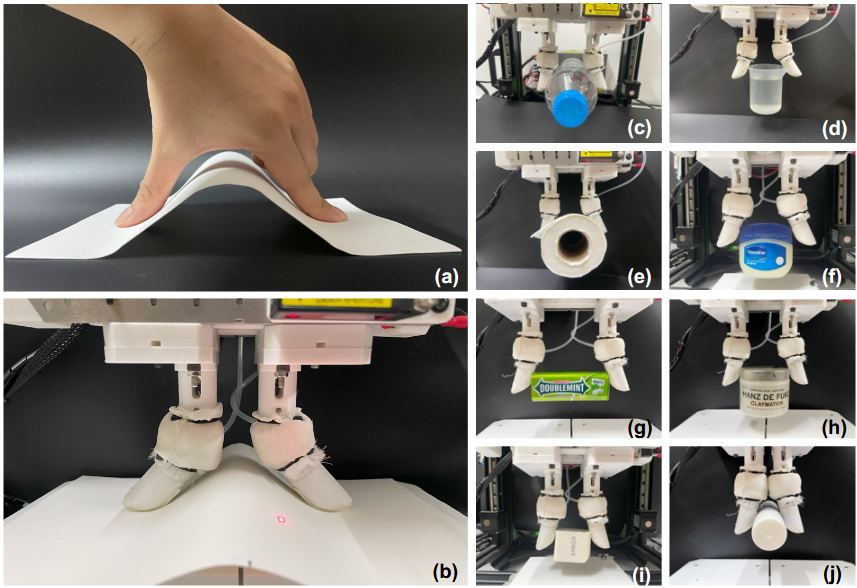
Grasping a variety of objects remains a key challenge in the development of versatile robotic systems. The human hand is remarkably dexterous, capable of grasping and manipulating objects with diverse shapes, mechanical properties, and textures. Inspired by how humans use two fingers to pick up thin and large objects such as fabric or sheets of paper, we aim to develop a gripper optimized for grasping such deformable objects. Observing how the soft and flexible fingertip joints of the hand approach and grasp thin materials, a hybrid gripper design that incorporates both soft and rigid components was proposed. The gripper utilizes a soft pneumatic ring wrapped around a rigid revolute joint to create a flexible two-fingered gripper. Experiments were conducted to characterize and evaluate the gripper performance in handling sheets of paper and other objects. Compared to rigid grippers,the proposed design improves grasping efficiency and reduces the gripping distance by up to eightfold.
Soft grippers show great flexibility in grasping various shaped objects when compared to conventional rigid grippers. In addition, soft grippers have been shown to be safe for handling fragile items without causing damage and are safe for humans because of the soft materials that they were made of.
This study was inspired by the human fingers grasping a sheet of paper larger than the size of an average hand palm and hypothesized that the bending of the distal phalanx and the stiffness of the distal interphalangeal (DIP) joints are the key factors in allowing the human and (or gripper in this case) to pick up large or thin objects. And such, a hybrid gripper prototype was developed. With a soft component attached to the joints to simulate the stiffness of the DIP joints and controlled by air pressure, this gripper is capable of grasping various objects by bending its joints similar to that of a human finger.
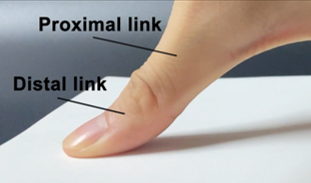
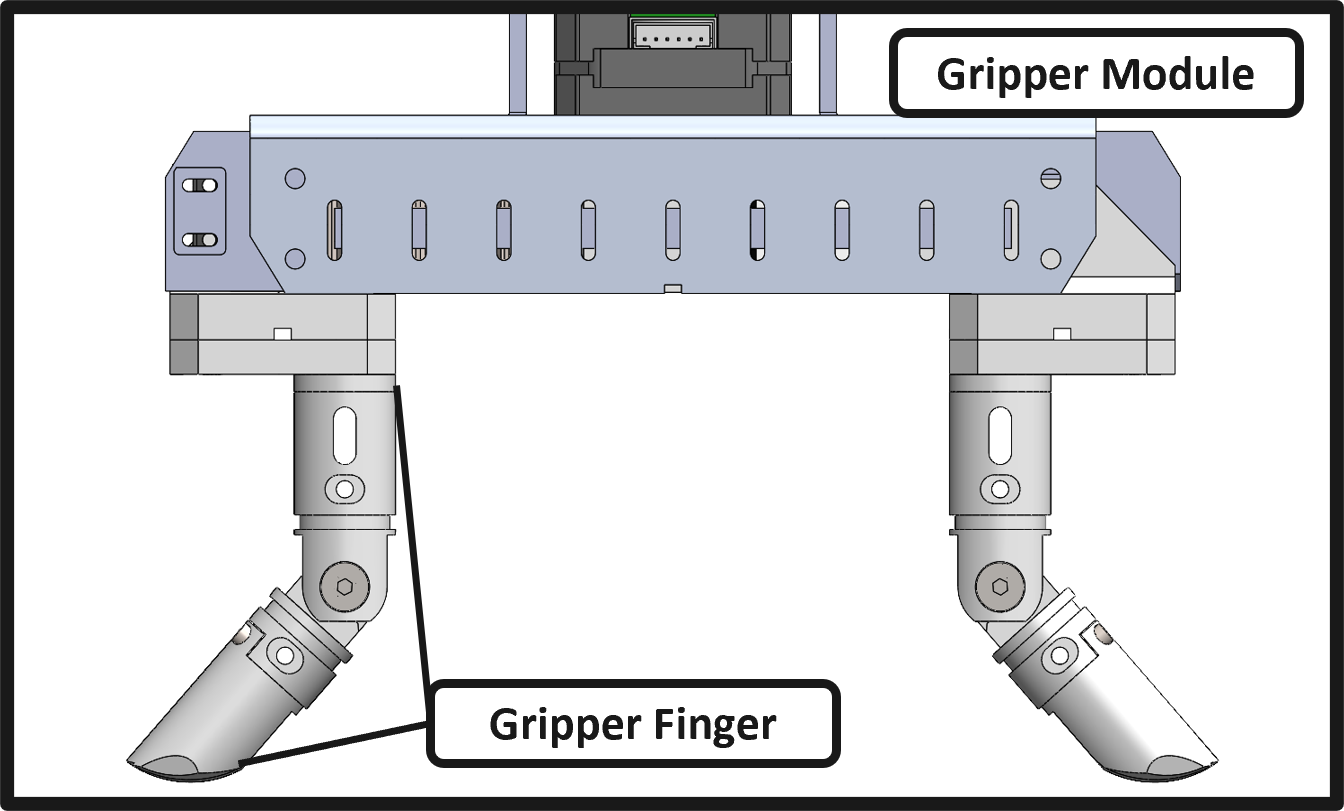
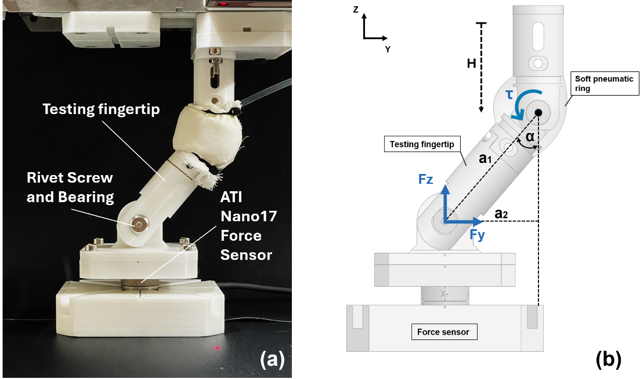
The gripper in this study is simplified from the human finger anatomy. Each finger consists of two links: the proximal link (referred to as finger body) and the distal link (which includes the fingertip and fingertip adapter).
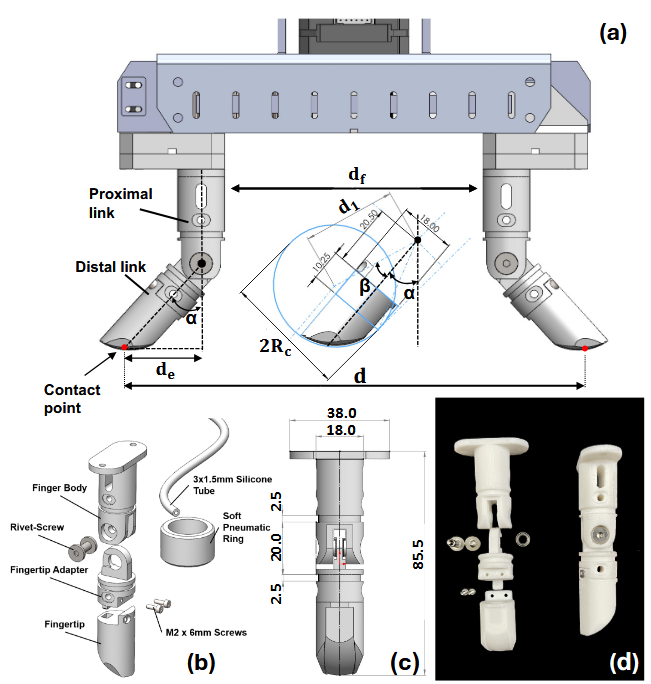
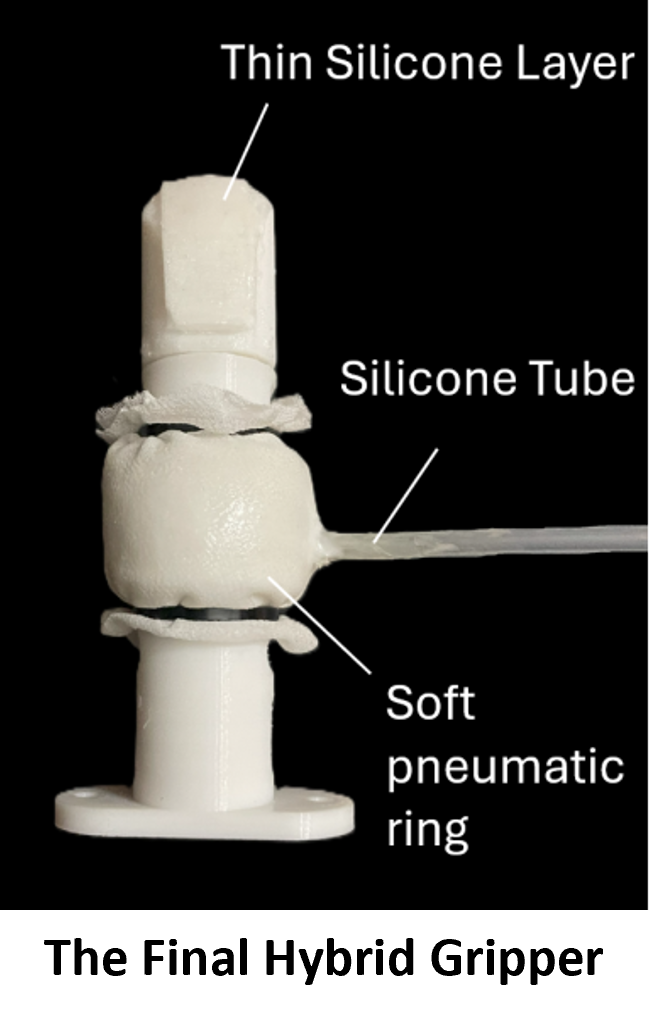
The fingertip resembles the distal phalanx of a human finger with the contact suface having a curved shape to ensure a constant contact area when the gripper touches a flat surface. The proximal link and distal link can rotate up to 80° in either direction around the revolution point. Additionally, the tip is padded with a thin silicone pad to increase friction.
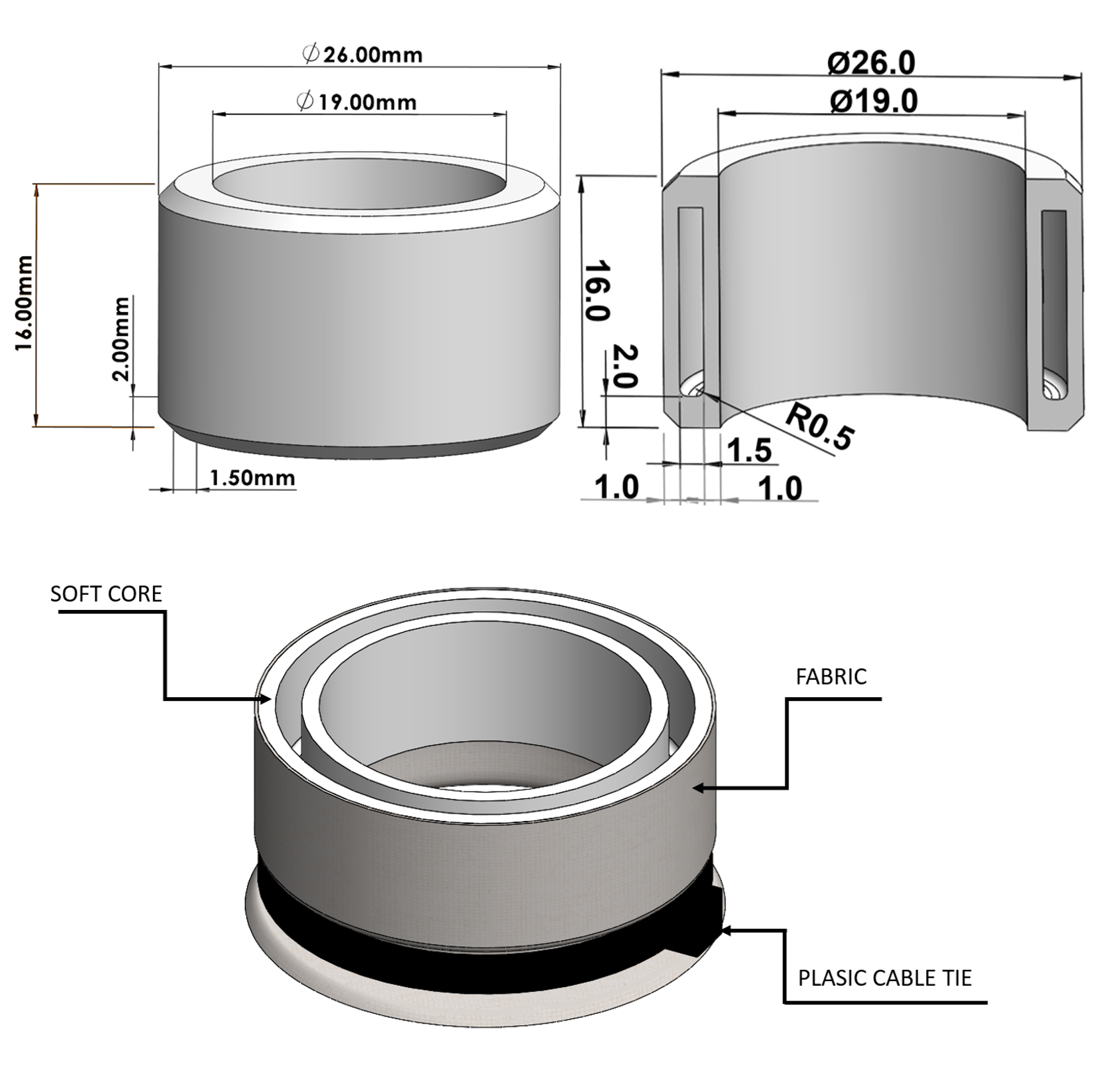
A soft pneumatic ring is attached to the joint of the finger to adjust the stiffness of the revolution point. The ring also has a fabric layer to restrict movements and to gain control of the joint, and as air pressure is applied, it will simulate stiffness on the joint similar to the DIP joint of a real human finger.
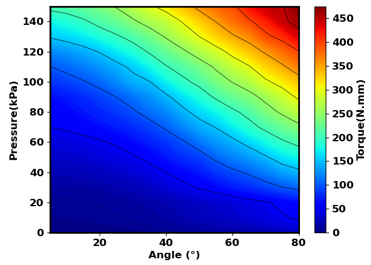
Torque generated by the soft pneumatic ring strongly corelated to the bending angle α and the input pressure. The increment of either the bending angle or the input pressure will result in the increment of the resistance torque or the stiffness of the finger joint. Within the torque range of 150-400 N·mm, the pressure and the bend angle are relatively proportional. This indicates that with high pressure and a sufficiently large bending angle, the likelihood of successfully grasping objects will be higher.
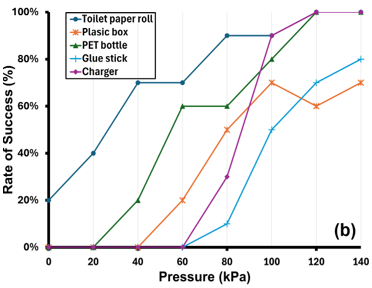
This design performs better with deformable objects and falls behind when it comes to objects with sharp edges or small contact area.
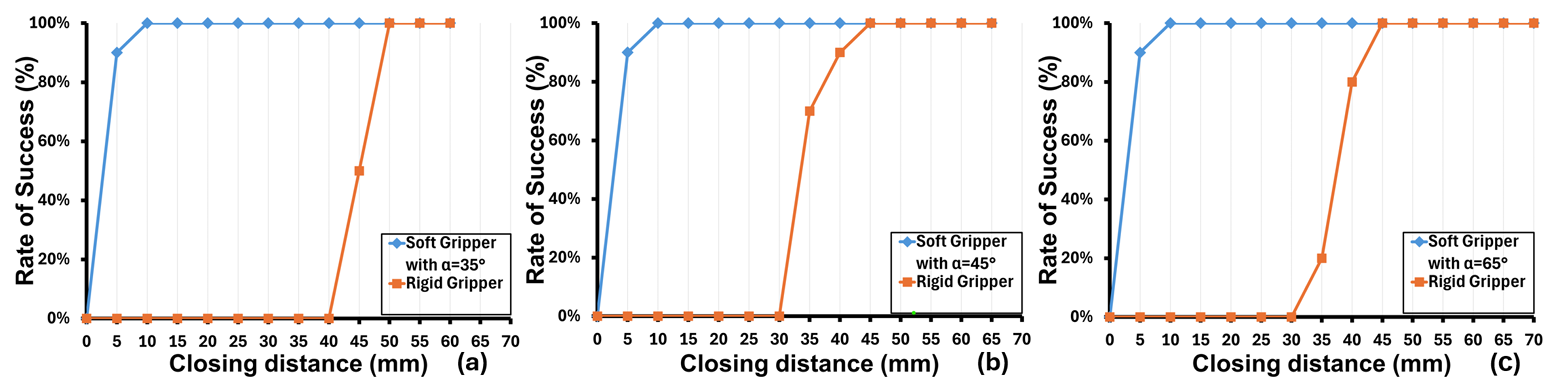
Closing distance of the proposed hybrid gripper design obtains better success rate (up to 90%).
@misc{tran2024hybridgripperpassivepneumatic,
title={Hybrid Gripper with Passive Pneumatic Soft Joints for Grasping Deformable Thin Objects},
author={Ngoc-Duy Tran and Hoang-Hiep Ly and Xuan-Thuan Nguyen and Thi-Thoa Mac and Anh Nguyen and Tung D. Ta},
year={2024},
eprint={2410.05789},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2410.05789},
}